📐 Kütle-Yay Sistemi
🪨 Fiziksel Model: Newton'un İkinci Yasası
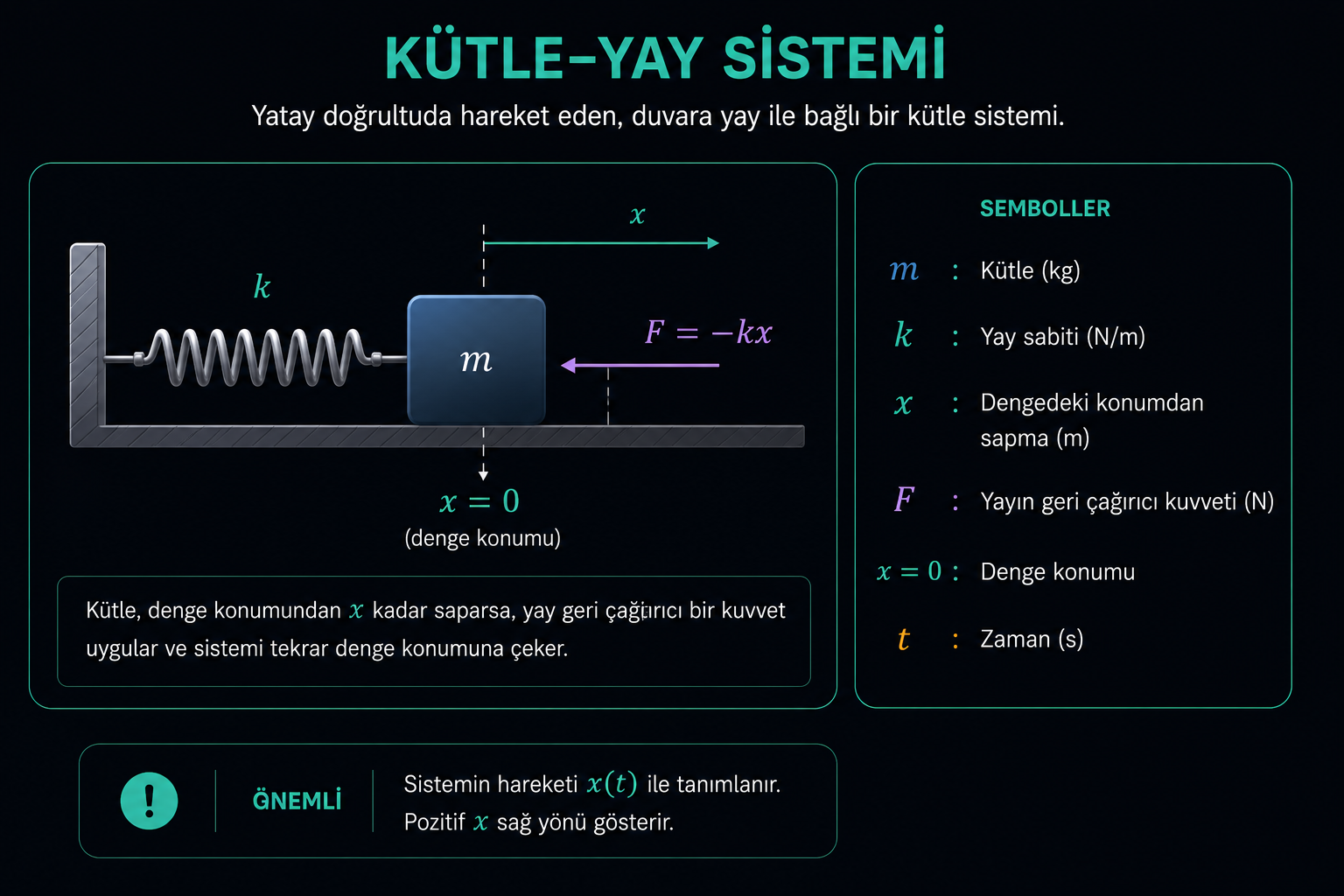
Bir kütle-yay sistemi, kütle (m), yay sabiti (k) ve sönüm katsayısı (c) ile karakterize edilir. Newton'un ikinci yasasına göre:
Sisteme etki eden kuvvetler:
- Yay kuvveti (Hooke Yasası): $F_s = -kx$ (geri çağırıcı kuvvet)
- Sönüm kuvveti (sürtünme): $F_d = -c \dfrac{dx}{dt}$ (hıza zıt)
- Dış kuvvet: $F(t)$ (harici zorlama)
📈 1. Sönümsüz Serbest Titreşim ($c=0$, $F=0$)
Denklem: $m\dfrac{d^2x}{dt^2} + kx = 0$ veya $\dfrac{d^2x}{dt^2} + \omega_0^2 x = 0$
Burada $\omega_0 = \sqrt{\dfrac{k}{m}}$ doğal frekans (rad/s) olarak adlandırılır.
Periyot: $T = \dfrac{2\pi}{\omega_0} = 2\pi \sqrt{\dfrac{m}{k}}$ s
Doğal frekans: $f = \dfrac{1}{T} = \dfrac{\omega_0}{2\pi} = \dfrac{1}{2\pi}\sqrt{\dfrac{k}{m}}$ Hz
Sistem hiç sönüm yoksa sonsuza kadar aynı genlikte salınır.
📉 2. Sönümlü Serbest Titreşim ($c>0$, $F=0$)
Denklem: $m\dfrac{d^2x}{dt^2} + c\dfrac{dx}{dt} + kx = 0$
Kritik sönüm: $c_c = 2\sqrt{mk}$
Sönüm oranı: $\zeta = \dfrac{c}{c_c}$
Sönümlü doğal frekans: $\omega_d = \omega_0 \sqrt{1 - \zeta^2}$
Durum 1: Az Sönümlü (Underdamped) - $\zeta < 1$
Durum 2: Kritik Sönümlü (Critically Damped) - $\zeta = 1$
Durum 3: Çok Sönümlü (Overdamped) - $\zeta > 1$
📝 Örnek 1: Sönümsüz Kütle-Yay Sistemi
📝 Örnek 2: Az Sönümlü Sistem
📝 Örnek 3: Kritik Sönümlü Sistem
🔴 Genel Denklem
$m\ddot{x} + c\dot{x} + kx = F(t)$
🟢 Doğal Frekans
$\omega_0 = \sqrt{\dfrac{k}{m}}$ (rad/s)
🟡 Sönüm Parametreleri
$c_c = 2\sqrt{mk}$, $\zeta = \dfrac{c}{c_c}$
🔵 Durumlar
$\zeta < 1$: Az sönümlü (salınım + sönüm)
$\zeta = 1$: Kritik sönümlü (salınım yok, en hızlı)
$\zeta > 1$: Çok sönümlü (salınım yok, yavaş)
Kütle-yay sistemi 2. mertebe lineer diferansiyel denklemle modellenir. Sönüm oranı $\zeta$'ya göre sistem az sönümlü (salınım yapar, genliği azalır), kritik sönümlü (en hızlı dönüş) veya çok sönümlü (yavaş dönüş) davranış gösterir. $\zeta = 0$ ise sönüm yoktur ve sistem sonsuza kadar salınır.